



����˾�ṩ�C�����{ԇ���C���˰��b���C���˾��̡��C���˱��B���C���˾S�ޡ�PLC���̣��˙C�����_�l�ȼ��g���գ�Fanuc�C�����{ԇ��OTC�C�����{ԇ�� �l�ǿƙC���˾��̡�ABB�C���˾��̣������C�����{ԇ������C�����{ԇ, �쿨�C���˾��̡����\�C���˾��̡����әC���˾��̡���ĥ�C���˾��̡��a��C���˾���
�����C���˹��ϾS�ϼ�-���������
01���C�����_�P���������߲��ܺ��l��
ԭ��
1.�_�P�ϻ���
2.�_�P�x�Ͳ�����
3.ˮ�ÿ�����늙C�Ȳ���·��
4.��·�ϻ�����·���þ��^С����ȱ�ࡣ
��Q�k����
������ϵ�y���Դ�P����Ȼ�����@����늙C���·�������Ƿ��ж�·��ӵجF�y���rע�⣺Ҫ��׃�lݔ���˲���������yԇ�r��׃�lݔ����ģ�K���ģ��������D��늙C�����Ƿ��п�������Ҫ�r���Q�_�P��
02���C���˽��|��������
ԭ��
�ܿ������ڽ��|����㕽��|�治ƽ��ɣ�������ɳ�����P����������ȱ�࣬����½��|�����_�P׃�l��Ԫ�����ğ��ġ�
��Q�k����
������ԓ���|����ؓ�d�_�P���£��քӿ����_�P���|�����^���Ͷ�κ�����߀�]�н�����茢�������Fĥƽ�����߸��Q�µĽ��|����
03���C���˟��^��������
ԭ��
1.늙C�^�d��
2.�x���Ƿ�ƥ�䣻
3.���ϻ��������Ƿ��^С��
��Q������
��늙C�c���^���x���Ƿ�ƥ�䣬�z��늙C�_��늙C����߀�дˬF����Ҫ���Q�µġ����Q�µ�ƥ��������
04���C���˽��|�������^���ϲ�������
ԭ��
1.��Ȧ��Ȧ��·��
2.���g�^����^�ĵ���
��Q������
�z�龀·�����Q�µ����^�^��
05���C����׃�l����������ϣ�
ԭ��
1.�����O���_��
2.׃�l���ϻ���
3.ˮ���^�d��
4.ȱ�ࣻ
5.��·�Ʉӡ�
��Q������
�Ȍ�׃�l����λ������̕r�g�����°l����ͬ�Ĺ��τt�f��׃�l�������^�m����ֱ�����������׃�l���a���Ĺ��ϴ��aӛ����������f���������Ͻ�Q�����·ȫ���o��һ�Σ��y����������������Ƿ�ƽ�⡣����Դȱ�����׃�l��ݔ��˟��ģ���׃�l�ϻ�������Q׃�l����
06���C���˾S������ݔ��ݔ���c���������������\�D��
ԭ��
1.��������ݔ��ݔ���c�L���l����������ɿ������Ȳ����|�c������
2.�����|�c���^����������ɣ�
3.������e��������ѱ�������
��Q������
��Ҫ���¿������ij�������ݔ��ݔ���cͨ�^ܛ���ĵ������|������ã���Ҫ�r���Q��������
07�������C���˾S�މ����������Ӵ�
ԭ��
1.�������ą���δ�{�ã�
2.ˮ�õ�Ч��̫�͡�
08���C����ϵ�y�r�Õr�ģ����������\�У�
ԭ��
1.��·�ij��F�Ʉӣ�
2.Ԫ�����ϻ���
�����C���˾S���ƹ�Ҋ���ϼ���Q������
ʾ�����z�飬�ŷ�������B���z�龀·���o�̾�·���z��Ԫ������Ҫ�r���Q��
09���C����©�ͣ�
ԭ��
1.���B������
2.���g�Բ����p�ĵȡ�
̎��������
�z��©��λ�ã��_�J©������IJ�������ͨ�^�鿴�D���Ȝʴ_�Д�©������IJ�����
10���C���ˮ�푣�
ԭ��Q�k����
���F��푹��ϕr��횵��͑��F���\�ࡣͨ�^�м��z���Дஐ푵��S���ų����Ӱ����ء��鿴������أ��z���F�۵��ֶξC���Дஐ�����Ĺ��ϡ�
11���C���˶��ӣ�
�\���^�̣�
���ڶ��Ӆ^��Ͷ������ą^�e�����ڶ��ӵ��\��ɞ�һ���y�c��
�F�A���\��������Q�Ŵ��������Q늙C�����Q�p�ٙC�����ų���
���M������ͨ�^���늉��z�y���F��șz�y���C�����g϶�z�y�ȷ����M�оC���Дࡣ
̎��������
1.�z����S���\�D��r��
2.�_�J����������S��
3.�_�J��늚↖�}߀�ǙCе���}��
12���C����܉�E�`�
ԭ��
1.܉�Eƫ̎����
2.�F��C���˙Cе���ϣ�
3.�������b������
4.�ⲿ���bλ��ƫ�
5.������һ�£�
6.�����ȹ��߰��b������
��Q�k��:
�˹��Ϟ�ܛ�Թ��ϣ���Ҫһ�Εr�g���^����ܜʴ_�Дࡣ
���w���E��
1.���Ùz���c���Д������ԭ��
2.�Ŀ�����ԭ������M�Ќ���̎����
3.�ҵ���Kԭ��S�ޡ�
13���C�������䣨��Σ�U����
ԭ��
1.���B������
2.���g��ĥ�p��
3.ƣ��ĥ�p��
��Q�k����
�_�J��ʲô��B�����䡢���������١���B��
�����B��
���ŷ����䡢�����ŷ����䡣
��������
һֱ���䡢߀������һ�Εr�gֹͣ��
��B��
��������䲻��
14���C����늚���ϣ�
ԭ��
��Ҫ��늙C������������늙Cݔ�����ز����������¶��ӡ�
15��늙C�����������
��Ҫԭ��
1.늙C���ϣ�
2.�Ŵ������ϣ�
3.�B����|���ϡ�
16���Cе���ϣ�
ԭ��
��늙Cݔ�����ط�����r�£�����әCе�����o늙C���d�ɲ�������ɶ��әCе���ϡ�
��Q�k����
�����ǜp�ٙC����߀���S�й��ϣ�Ȼ��ᘌ��Խ�Q��
17���ŷ���ۙ�e�`��
ԭ��
1.��ͨ����ԃ���I�r��B�͈r��B��
2.�\���ͨ�^������غͬF����r�\�ࣻ
3.�S�ޡ��ƶ��S��Ӌ����
��Q�k����
1.�_�J���l���_���� �����l���_��������
2.�z����Ʒ��r�����_���Ϳ�ȡ�әz�飩��
3.����늙C�\�ࣨ����늙C�Ϊ����D늣���
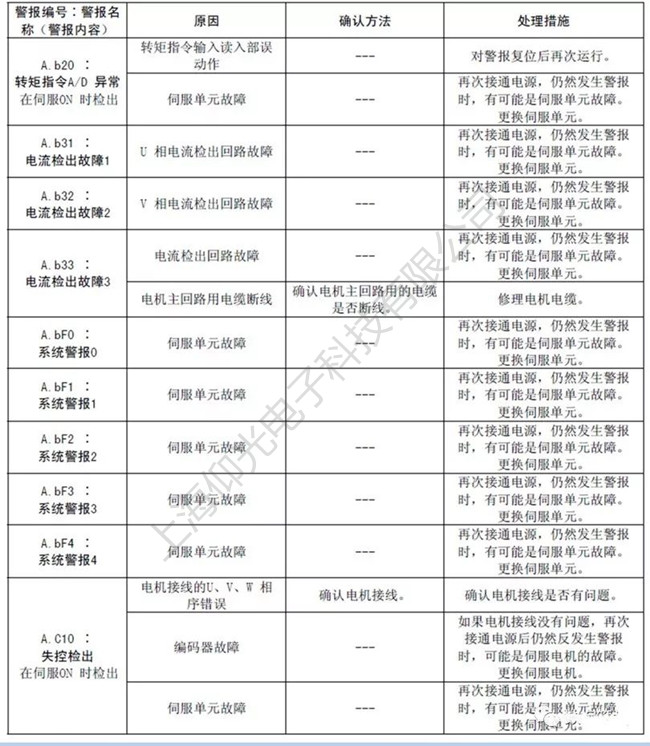
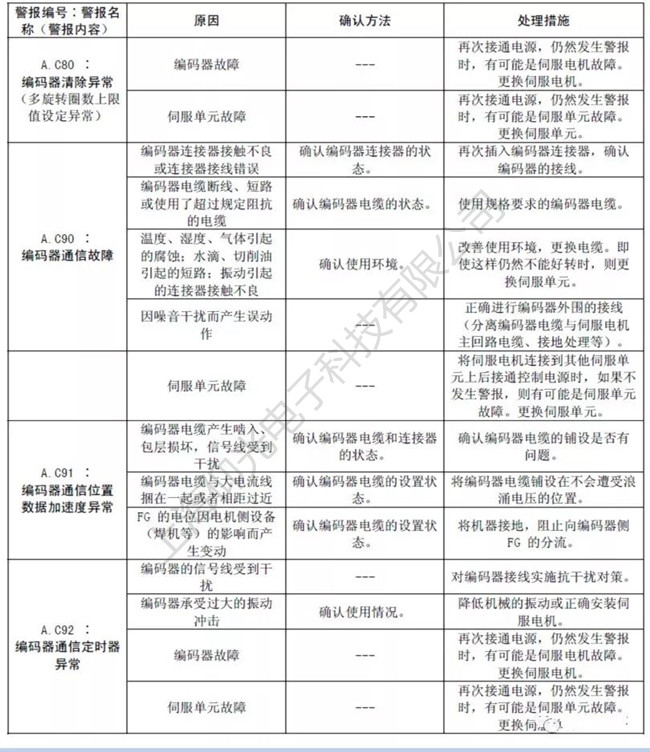
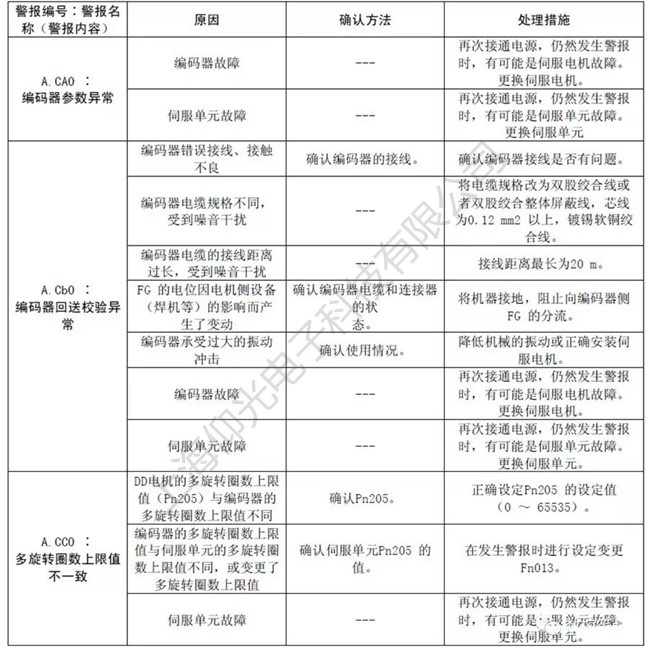
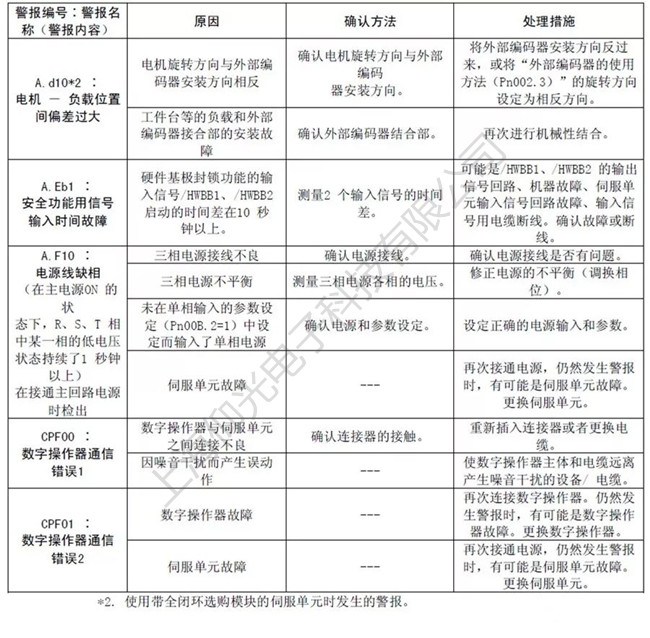
18���C���˾����ԭ��̎����ʩ��


�D�dՈע����̎���Ϻ�������ӿƼ����I�ŷ������S��,�ŷ�늙C�S��
����朽ӣ�http://laughtheater.com/fuwu/Services_Show4551.htm
�ŷ������S�� �ŷ�늙C�S�� �|�����S�� ׃�l���S��
ϵ��ʽ��
�Ԓ��021-50157782
�֙C��13817011982 ��̖ͬ
�]�䣺shygdzi@163.com
ϵ�ˣ�����
�Wַ��http://laughtheater.com
�� �҂��_���Üyԇ�ýo�͑�����������
��һƪ������TP1200���T���|��ʧ�`�S��
��һƪ��fagor늙C��Ҋ�����Ų鼰�S��
